
Know How
SafeRadar Research has a wide experience in radar system design, antenna design, and signal processing. The employees of this company has about 20 years of experience in analyzing and designing both commercial 77 GHz radar system, and military radar systems, e.g., Automotive, Fighter radars, Ground base radars and AEW.
More specifically, SafeRadar Research is providing system analysis using adequate radar models and radar data acquired from experiments. For instance, this analysis covers all about tracking in various target scenarios (e.g., urban, and rural road environment), influence of clutter & interference, detection & estimation performance analysis (e.g., GMTI/STAP analysis of slowly moving targets), and finally required sensor linkbudget and spurious free dynamic range regarding these target scenarios.
——
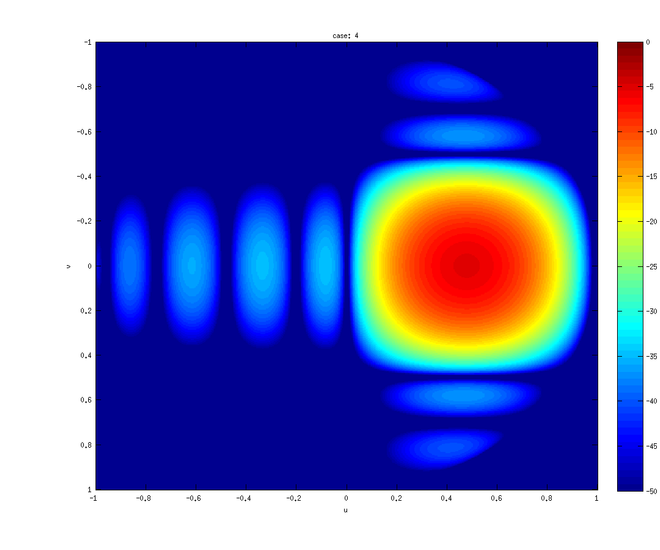
Array antennas
In antenna array design it is convinient to have a fast tool that supports antenna farfield analysis for various hardware artifacts. This is used to obtain a fast feedback during the concept studies. Thereafter, implementation and analysis is made in various EM-computational tools such as HFSS, CST MICROWAVE STUDIO, ADS Momentum.
Moreover the farfield results (and/or steering vector outcomes for multi-channel cases) are then used for the radar simulation tool where for instance detection and estimation performances are examined.
Detectors
The design of the radar, in particular the radar waveform, needs to be considered together with the design of the detection algorithms. Conventially, radar detectors are typically working on one spatial channel and looking fpr targets along both range and Doppler. Thereafter, angular estimation is made using monopulse. To obtain a predictible behavior of the target detection probability, Constant False Alarm Detectors employed for radar systems are crucial. The most common one used is Cell averaging CFAR detectors that is oftenly used as a baseline comparison for other CFAR techniques.
Space time adaptive processing (STAP) were introduced to the radar community in 1973 by Brennan and Reed. The basic dilemma of STAP is that: there is almost never enough training data to estimate the interference reliably! The main reason for this problem is the heterogeneous nature of the clutter, i.e. the clutter signal in one range bin may be quite different from the signals in surrounding range gates.
MIMO (Multiple Input Multiple Output) is an extension of the SIMO that is the STAP case. Using this we also are able to create a virtual receiver array by the use of the several transmitting apertures, i.e., we both have steering vectors at both transmit and receive. Typically, detection & estimation performance losses are obtained since the transmit steering is more or less unknown. Thus, this is the reason that some experts (e.g., Fred Daum at Raytheon) denote the MIMO concept for snake-oil signal processing frameworks, i.e., we will not gain any performance, only higher computational demands.

Tracking
From the radar detections or plots it is convinient and necessary to filter the target trajectory. Otherwise, the statistical variations, e.g., due to target RCS fluctuations, will make it more difficult to estimate the tracked object’s course, speed and closest point of approach.
Tracking filters that commonly are used are different kind of Kalman filters (KF), e.g., LOS KF , Extended KF, Unscented KF, Interacting Multiple Models or Gaussian Mixture, and so on. Another filter that is very useful in dense target situations, background estimation, and non-linear target motions are versions of PHD (or Random Sets) filtering, e.g., CPHD, GPHD, FISST, and Sequential monte carlo PHD. However, the most powerful and robust filtering that also provides an association framwork, according to us, is the Multi Hypothesis Tracking (MHT). Note that for all the other filtering techniques presented here we need to add an assoication framework (e.g., Global Nearest Neighbor, Auction, PDAF, and so on)

Sensor fusion
Fusion of data from Homogeneous (radar-radar) or Heterogeneous Sensor (radar-camera-LIDAR) configurations is a crucial part in order to further enhance situation assessment of the sensor platform, i.e., detection & tracking, and decision making system (central unit).
For instance, we can have a Decentralized/Distributed Detection where the general case comprises a framework supporting N sensors, M-ary hypothesis test, D-ary alphabet. Regarding enhanced filtering of detections (estimating/predicting target trajectory), and additional information extraction can be relying on Distributed Estimation for tracking (non-linear bayesian filtering), and Distributed Quantization/Information Measures.